
☆ 发自新买提 Android 25.07.07mrmaja 写了: 2025年 7月 20日 11:21 这又不是他个人的认知,去年特斯拉FSD12出来之后,国内所有搞智驾的全来硅谷试驾,何小鹏亲自来了,还发了微博,华为派了几十个工程师来,因为FSD12说明纯视觉端到端的方法是可以成功的。
tesla 替整个智驾行业趟雷,指出了走向L4的大方向。小鹏汽车智驾感知负责人王弢离职,就是敏感地知道。原来基于感知的那套技术已经没戏了。
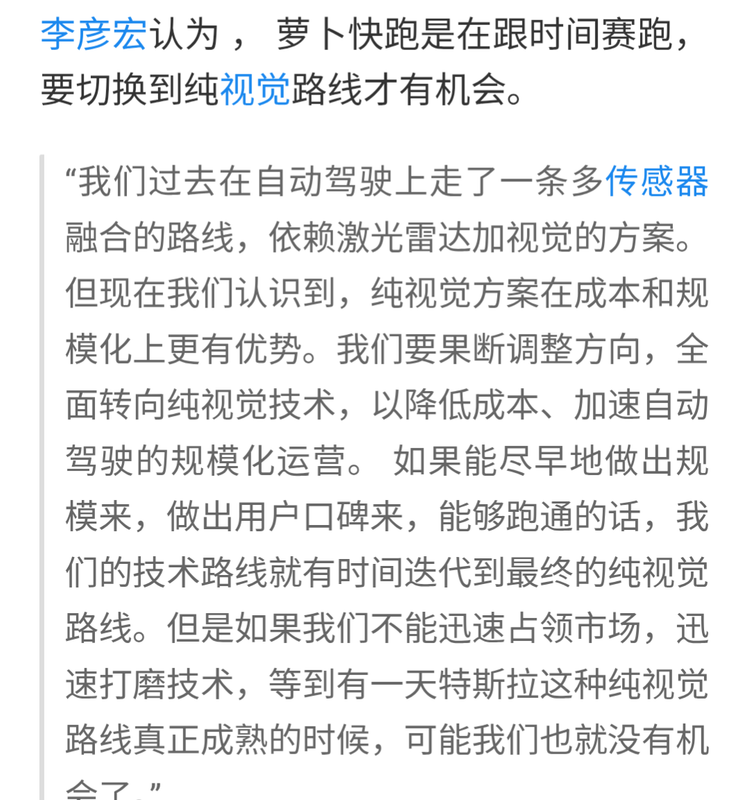
墙内传言视觉方案是自动驾驶的未来
版主: lexian
#21 Re: 墙内传言视觉方案是自动驾驶的未来
什么逻辑?hw,hxp是认定智驾的标准?

#22 Re: 墙内传言视觉方案是自动驾驶的未来
根本不是google的问题,国内很多作浏览器搜索的都被网信办强制下架整顿掉了,baidu只要比技术就是倒数第一
If printing money would end poverty, printing diplomas would end stupidity.

#23 Re: 墙内传言视觉方案是自动驾驶的未来
说用激光雷达加视觉混合的,这种最简单的叠加都是最简单的逻辑,不能这么选估计就是只能排他的方式来指挥,用两种方案叠加等于是一个司机长了两个大脑,一个指挥往左一个指挥往右,你这还加权比重计算该听谁的,前面已经撞车了
x1


#24 Re: 墙内传言视觉方案是自动驾驶的未来
自信点,激光和视觉冲突的时候,用激光的结果
无需思考
无需思考
Burlingame 写了: 2025年 7月 20日 17:48 说用激光雷达加视觉混合的,这种最简单的叠加都是最简单的逻辑,不能这么选估计就是只能排他的方式来指挥,用两种方案叠加等于是一个司机长了两个大脑,一个指挥往左一个指挥往右,你这还加权比重计算该听谁的,前面已经撞车了

#25 Re: 墙内传言视觉方案是自动驾驶的未来
我实在想不出,按字面理解,纯视觉怎么就赢了。
[qu@ote=mmking post_id=5900228 time=1753048308 user_id=7709]
自信点,激光和视觉冲突的时候,用激光的结果
无需思考
[/quote]
[qu@ote=mmking post_id=5900228 time=1753048308 user_id=7709]
自信点,激光和视觉冲突的时候,用激光的结果
无需思考
[/quote]
#26 Re: 墙内传言视觉方案是自动驾驶的未来
特吹为了舔elon这种把你们当小白鼠的无良方案必须打压lidar. 毕竟纯视觉这玩意就是毒品而已,high过就死的方案
[/quote]toraasakusa 写了: 2025年 7月 20日 18:01 我实在想不出,按字面理解,纯视觉怎么就赢了。
[qu@ote=mmking post_id=5900228 time=1753048308 user_id=7709]
自信点,激光和视觉冲突的时候,用激光的结果
无需思考
x1
If printing money would end poverty, printing diplomas would end stupidity.

#28 Re: 墙内传言视觉方案是自动驾驶的未来
白痴都知道纯视觉的问题在哪里,人类开车都需要雷达辅助,到了elon这里就变成丫的纯视觉比人还牛,x
x1
If printing money would end poverty, printing diplomas would end stupidity.

#32 Re: 墙内传言视觉方案是自动驾驶的未来
减低成本上看,肯定是纯视觉有优势。但是这些人也应该都知道纯视觉在安全上是有理论漏洞的,比如低光线,比如在复杂路况/环境下的AI视觉误判。off 写了: 2025年 7月 20日 10:47 自己看吧。
我觉得李的认知还是让人敬佩的:第二还有机会,出局会被彻底淘汰。
btw,另外一个版本的流言是李强调了fsd适应性(自学习)是车路协同的先天短板。
#33 Re: 墙内传言视觉方案是自动驾驶的未来
这问题当然好解决的很,首先就是完善算法,视觉结果自己就可以有一个internal score, 如果自己confidence低就要调用lidar结果,这有多难。说白了还是tesla马工水平低,只会掉包调参
x1
If printing money would end poverty, printing diplomas would end stupidity.

#35 Re: 墙内传言视觉方案是自动驾驶的未来
激光雷达探测的距离视角信息放到视觉探测的物体里一起做寻路算法,简单轻松。激光雷达看到前面地上有坑,视觉只看到一个黑块,加一起就是个坑了。激光雷达看不清的平面色彩形状路面怪异行人车辆啥的靠视觉识别去赖美豪中 写了: 2025年 7月 20日 20:24 这问题当然好解决的很,首先就是完善算法,视觉结果自己就可以有一个internal score, 如果自己confidence低就要调用lidar结果,这有多难。说白了还是tesla马工水平低,只会掉包调参
x1
上次由 goFan 在 2025年 7月 20日 20:46 修改。
#37 Re: 墙内传言视觉方案是自动驾驶的未来
ai是跟人学的怎么开车,不是人教的怎么开车,人长眼了看见路上有什么情况该怎么处理,AI怎么学的,就像肌肉记忆,而不是转化成if else的code,人身上只长了眼睛,没连上lidar,所以AI学的也是用眼睛开车,不是用lidar测距离。如果特斯拉司机进化成身上长了lidar,开车时用两只肉眼外加八只lidar进大脑做判断,AI才能学会怎么即用视觉又用lidar赖美豪中 写了: 2025年 7月 20日 20:24 这问题当然好解决的很,首先就是完善算法,视觉结果自己就可以有一个internal score, 如果自己confidence低就要调用lidar结果,这有多难。说白了还是tesla马工水平低,只会掉包调参