
略显牵强
把e1 = j, e2 = k, e1e2 = i
跟在#68说的是一个东西,因为e1e2不在{e1, e2}里面,还是还是3个维度
版主: verdelite, TheMatrix

苍井吱 写了: 昨天 20:10Gemini:
"To represent a 2D rotation using the \(qvq^{-1}\) form, you must embed the 2D plane into 3D space. The rotation is then treated as a 3D rotation about an axis perpendicular to the 2D plane."
不会是这个意思吧
如果在复数域,交换律qvq^{-1} = v,什么也没干
普通复数对实数向量没有意义
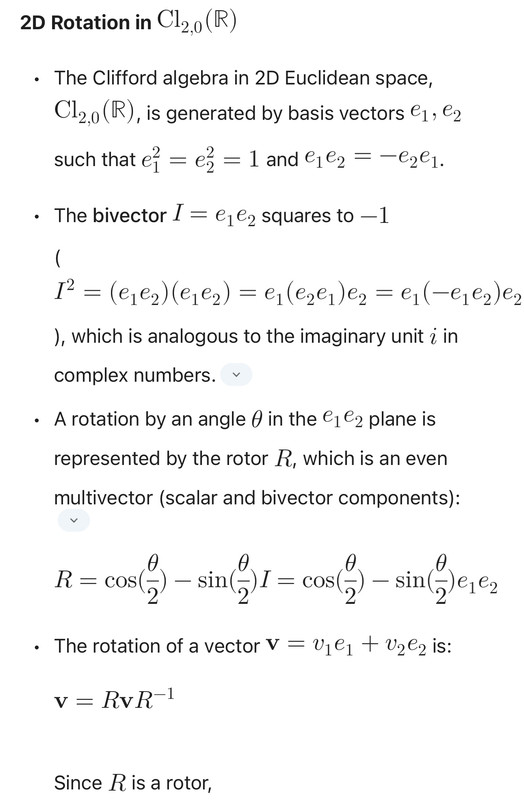
最好在Clifford代数里面讨论,i 是e1e2,可以和普通的向量的基e1 e2作用。


Caravel 写了: 昨天 19:56用原始的{e1,e2,e3} vector和几何积规则,完全可以实现旋转
问了一下Gemini说
纯四元数,同构于这种普通三维vector,所以v也可以用四元数表示
(1)
e1e2 <--> i
e2e3 <--> j
e3e1 <--> k
但是
(2)
e1 <--> i
e2 <--> j
e3 <--> k
是不对的。
(1)是algebra同构,也是field同构。(2)只是vector space同构。我觉得gap在这里。当然这不是quaternion用于旋转的方法的gap,是我理解上的gap。
很简单的规则
普通向量
a e1 + b e2
e1e1= 1
e1e2=-e2e1
旋转 cos theta/2 + e1e2 sin theta/2
套代数规则就自己出来了
TheMatrix 写了: 昨天 20:46(1)
e1e2 <--> i
e2e3 <--> j
e3e1 <--> k但是
(2)
e1 <--> i
e2 <--> j
e3 <--> k是不对的。
(1)是algebra同构,也是field同构。(2)只是vector space同构。我觉得gap在这里。当然这不是quaternion用于旋转的方法的gap,是我理解上的gap。
只要满足的操作规则一样,就可以替代吧,我没有演算过,可以让AI给算几个例子。
有很多表达形式。
如果三维旋转用于理解几何意义,可以用齐次坐标表示的矩阵向量相乘的格式,但齐次坐标不同于欧氏坐标,多一个齐次维度;
这样二维、三维、n维表示形式都是R.v
如果找一般的表达式,其实是有的,Rodrigues 旋转,稍微修正一下
https://arxiv.org/abs/1404.6055 这个是齐次坐标的
这是可以通过矩阵向量的形式证明的,非常巧妙。Multiple View Geometry in Computer Vision
Second Edition 这本书的第583-585页
Richard Hartley
Andrew Zisserman
书里还介绍了四元数。
齐次坐标有人认为复杂,尤其不少程序员这么认为,所以,编程序的时候,用于表示旋转、掌握四元数到齐次矩阵和向量相乘之间转换的规则很有用,尤其是为了在多轴多次旋转的情况下,不至于产生万向节锁死的情形(就是复合旋转情况下,有些情形会发现丢失一个自由度,或者某个方向上的旋转可操控度下降),很多程序员认为使用四元数容易让程序员在编写复合旋转程序的时候采取适当方法避免这种锁死的情形发生(但实际上用矩阵表示也一样可以采取措施避免)
这些方法,在类似Mathematica的大型软件中,已经集成到 ** 这类算符中,可以通过定义四元数、直接用相关算符实现四元数操作。
cooooldog 写了: 今天 05:55有很多表达形式。
如果三维旋转用于理解几何意义,可以用齐次坐标表示的矩阵向量相乘的格式,但齐次坐标不同于欧氏坐标,多一个齐次维度;
这样二维、三维、n维表示形式都是R.v
如果找一般的表达式,其实是有的,Rodrigues 旋转,稍微修正一下
https://arxiv.org/abs/1404.6055 这个是齐次坐标的这是可以通过矩阵向量的形式证明的,非常巧妙。Multiple View Geometry in Computer Vision
Second Edition 这本书的第583-585页
Richard Hartley
Andrew Zisserman
书里还介绍了四元数。齐次坐标有人认为复杂,尤其不少程序员这么认为,所以,编程序的时候,用于表示旋转、掌握四元数到齐次矩阵和向量相乘之间转换的规则很有用,尤其是为了在多轴多次旋转的情况下,不至于产生万向节锁死的情形(就是复合旋转情况下,有些情形会发现丢失一个自由度,或者某个方向上的旋转可操控度下降),很多程序员认为使用四元数容易让程序员在编写复合旋转程序的时候采取适当方法避免这种锁死的情形发生(但实际上用矩阵表示也一样可以采取措施避免)
这些方法,在类似Mathematica的大型软件中,已经集成到 ** 这类算符中,可以通过定义四元数、直接用相关算符实现四元数操作。
非常感谢,我回去消化一下
欧拉角也是R_{3x3}v的形式,跟齐次矩阵是一个东西吗?
2021年度十大优秀网友
2028年度优秀版主
按摩店前股东
脑特残的荣誉爹地
我也有同样的疑惑。所以我说(2)是巧妙的,不知道是谁发现的,刚好{i,j,k}这个子空间也是封闭的。
(1)在even subalgebra里,(2)根本不在。也许只是凑巧。
TheMatrix 写了: 昨天 20:46(1)
e1e2 <--> i
e2e3 <--> j
e3e1 <--> k但是
(2)
e1 <--> i
e2 <--> j
e3 <--> k是不对的。
(1)是algebra同构,也是field同构。(2)只是vector space同构。我觉得gap在这里。当然这不是quaternion用于旋转的方法的gap,是我理解上的gap。


